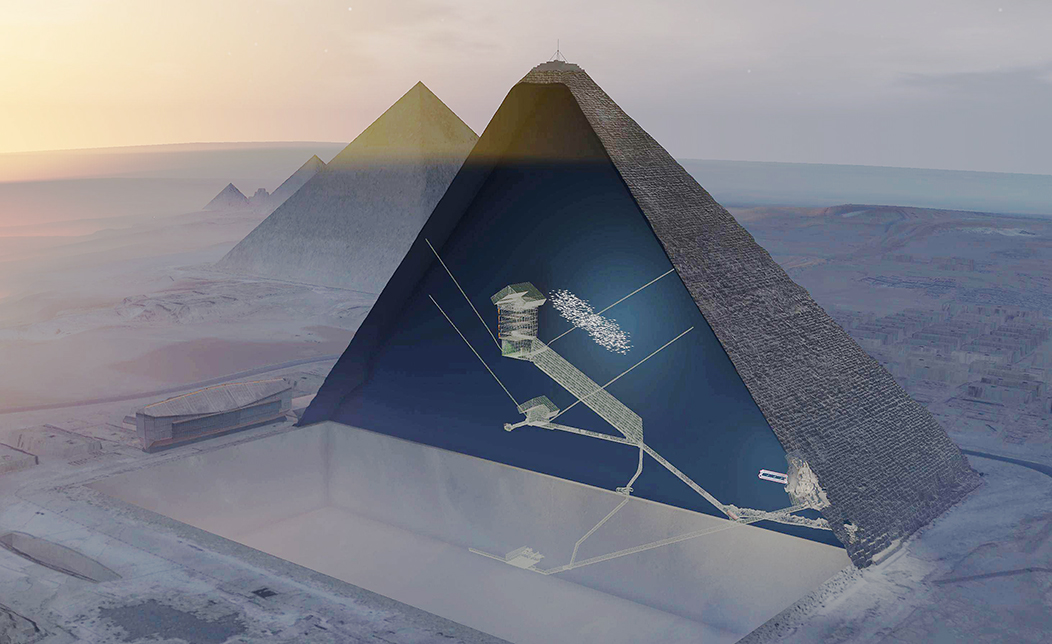
In 2016, two new voids were discovered by Scanpyramids in the Great Pyramid of Khufu. A Big Void above the big gallery and a smaller one behind the chevrons north face of the pyramid.
Muon tomography and thermal imaging were used. They are currently conducting a new measurement campaign to get higher precision of the volumes and their locations.
INRIA, and in particular my boss Jean-Baptiste Mouret has been contacted to start thinking about minimally invasive exploration techniques. A 2,5 inch (38 mm) diameter hole has been suggested to deploy robots in the north face void through the chevrons.
My work is to design and test from scratch robots prototypes that respond to that concern. The main challenge is the small diameter of the hole. I had to find innovative ideas of design and manufacture to get the first working prototypes.
The main feature of this robot is to have a first view of the void by deploying cameras to get high resolution pictures and lidars to get precise 3d measurement of the void.
Features:
Fit in 38 mm diameter hole (1.5 in)
Deploy a camera
Actuate the camera on 2 axes
Center of rotation on the nodal point of the cam, for better stitching panorama
Deploy powerful lights
Self-propulsion through the hole
End of hole detection
Attach different sensors
Laser
Lidar
4k gimbal
Scout Robot 3D Rendering (first prototype)
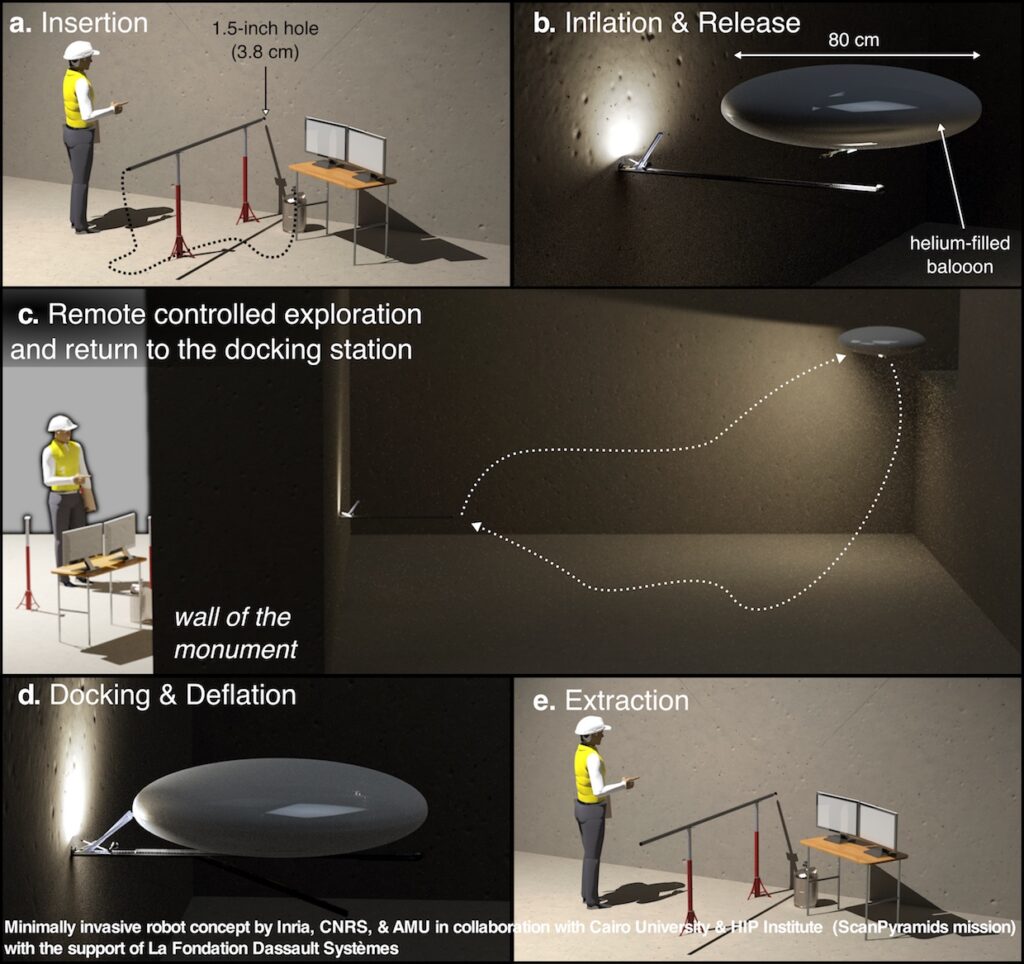
Flying Exploration
In the case where the void is too large to be studied only from the hole, it can be necessary to perform remote robotic exploration. Flying robots have the ability to evolve without taking into account the nature of the floor, in the contrary of wheeled or legged robots. If a big step or a hole is present, it is possible to just fly over the obstacle.